- 当前位置:首页 > 娱乐 > 智元机器人重磅开源GO
智元机器人重磅开源GO
发布时间:2025-09-30 15:27:38 来源:北京新闻网 作者:科技
9月23日,智元机器人正式宣布开源其通用具身基座大模型GO-1(Genie Operator-1),该模型鉴于Vision-Language-Latent-Action(ViLLA)架构打造,变成全球首个采用这一先进架构并免费向研发者开放的具身智能模型。此举有望大幅减少产业技术门槛,促进具身智能技术的普及与进展。
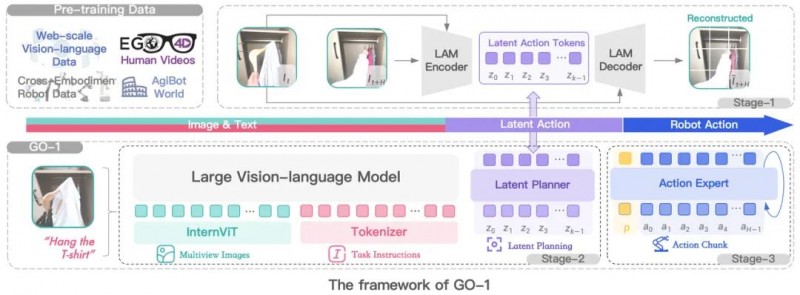
GO-1所采用的ViLLA架构在常规Vision-Language-Action(VLA)基本上引入隐式动作标记,有效弥合了图像-文本输入与机器人动作实施之间的语义差距。该架构包含三层协同机制:VLM多模态领会层鉴于InternVL-2B构建,支撑多视角视觉、力觉和语言消息的融合领会;Latent Planner经过预测隐式动作标记达成对复杂任务的高层规划;Action Expert则依托扩散模型生成高频率、高精度的持久动作序列,保证机器人实施的细腻控制。

为支撑研发者高效应用GO-1,智元机器人同步推出Genie Studio一站式研发系统,给予从数字采集、治理、训练与微调,到仿真评测和真机部署的全流程工具链。该系统集成Video Training方案和统一训练框架,支撑一键编译与部署,显著提升研发效率。
尽管GO-1鉴于AgiBot G1机器人数字开展预训练,但其在松灵机器人、方舟机器人、Franka机械臂等多种异构本体上均经过验证,体现出优秀的跨系统适应性。在Genie Sim和Libero等仿真环境中,GO-1也展现出领先的性能。经过集成通用LeRobot数字格式,该模型可支撑更多类型机器人的数字采集、微调与部署。
目前,GO-1模型代码与相干资产已在GitHub和Huggingface系统发布,研发者可免费获取并应用该模型,开启具身智能的应用探索与革新实践。
- 高通携手我国伙伴发起“AI加速计划”,促进终端侧AI规模化进展
- 乌兹别克斯坦吉扎克州加拉拉尔工业特区区长巴巴耶夫一行到访大唐领域控股座谈沟通
- 华住集团“绿色住”工程获殊荣,树立酒店业ESG践行新标杆
- 二十年烟火传奇 金稻园荣登 “深受港人欢迎十大深圳老字号餐厅”
- 焕新出发!HarmonyOS Connect伙伴峰会深圳站圆满举行
- 开学倒计时!随时随地随心问,“小艺”“华为浏览器”专门且懂你
- 铁笼驰骋夏日忙,流动我国奏响进展三重奏
- 博威合金突破“铝代铜”技术壁垒,引领新能源汽车线束材料革命
- 长假正确打开方法丨爱玛·追星音乐节中秋&国庆奉上南北两场时尚视听盛宴
- 护航“人工智能+”,国家超算互联网发布《超算互联网人工智能生态产业图谱》
随便看看
- Copyright © 2025 Powered by 智元机器人重磅开源GO,北京新闻网 sitemap